📍嵌入式系統與自主飛行實驗室
- 簡介
- 成員
- 專業無人機技術服務
- 實驗室設備
- 研究成果

實驗室簡介
本實驗室創立於2005年,以發展無人飛行載具(UAV)為主要研究,於2008年試飛完成固定翼飛機之自主飛行系統,包含16bit duel-core autopilot、地面導控站和指向型天線追蹤系統,並於2009年與業界共同完成60km澎湖跨海飛行的紀錄。2016年開始發展電動飛機,與本校飛機設計製造專長的老師合作,陸續完成106W的太陽能和200W的燃料電池混電能無人飛機,其中3m翼展和重4.5kg的太陽能無人機完成6小時的滯空飛行。2017年繼續完成3架10m翼展和重22~25kg的中型太陽能無人機的製作,經過五次的試飛和飛空調校,達到爬高1300m的自主飛行紀錄。此後,將繼續發展具創意的航太系統與(高)長滯空無人機,挑戰平流層長滯空飛行。
點擊查看
主持老師
國立虎尾科技大學 飛機工程系暨航空與電子科技所
教授 林煥榮 博士
主要專長:控制、航空、資訊
連絡電話:05-6315542
研究生
2009潘政輝
遙控直昇機輔助駕駛系統之實現
Implementation of the co-pilot for RC helicopter
刊物
- 中華民國發明專利第I379702號
- 2008教育部全國微電腦應用設計製作競賽研究所控制組第二名
- 2009航太學會/民航學會聯合學術研討會
2010陳政旗
UAV多機架構導控地面站設計與實現
Development and Implementation of Multi-UAV Ground Station
刊物
- 中華民國發明專利第I443549號
- 2012台北國際發明暨技術交易展發明競賽銀牌獎
- 2011教育部全國技專校院研發成果記者發表作品
- 2009u-star教育部大專畢業生創業賽製造業前五名
- 2009全國無人飛行載具設計賽視距外飛行組第一名
- 2009年Microsoft嵌入式系統設計競賽第二名
- 2009年全國大專校院嵌入式系統(ES)設計競賽創意應用組佳作
- 2009年校慶學生專題製作成果展示與競賽第一名
- 2008全國無人飛行載具設計賽視距外飛行組第一名
- 2008教育部全國微電腦應用設計製作競賽研究所組第三名
- 2008 Microchip 16-bit微控制器校園專案研發成果競賽第二名
- 2011國防科技學術研討會
- 2009國防科技學術合作計畫成果發表會論文集
2010陳韋憲
UAV自主飛行系統的設計、實現與應用
Development, Implementation and Application of UAV Autopilot Systems
刊物
- 中華民國發明專利第I443549號
- 2012台北國際發明暨技術交易展發明競賽銀牌獎
- 2011年教育部全國技專校院研發成果記者發表作品
- 2010 Microchip16/32 bit MCU校園專案設計競賽第二名和技術挑戰獎
- 2009u-star教育部大專畢業生創業賽製造業前五名
- 2009全國無人飛行載具設計賽視距外飛行組第一名
- 2009年Microsoft嵌入式系統設計競賽第二名
- 2009年全國大專校院嵌入式系統(ES)設計競賽創意應用組佳作
- 2008全國無人飛行載具設計賽視距外飛行組第一名
- 2008教育部全國微電腦應用設計製作競賽研究所組第三名
- 2008 Microchip 16-bit微控制器校園專案研發成果競賽第二名
- 2009航太學會/民航學會聯合學術研討會
2011周品言
旋翼機協同飛行控制系統
Helicopter co-pilot System
刊物
- 2011 Microchip微控器校園專案研發成果競賽第四名
2013黃宗仁
無人飛機酬載發展應用於大氣與溫室氣體之量測
The Development of UAV Payloads for Atmosphere and The Green House Gases
刊物
- 2012航太學會學術研討會
2014袁聖崴
地磁量測與無人飛機地磁量測酬載之研究
Researches of Geomagnetic Measurements and Unmanned Aerial Vehicle Payload of Geomagnetic Measurements
刊物
- 2013 Microchip微控制器校園專案研發成果競賽
- 2013航太學會學術研討會
2014尚俊宏
OpenCV於Android系統下實現即時UAV地面影像辨識與目標追蹤之可行性研究
Feasibility Study of OpenCV Implement Real-time Object Tracking by Image Recognition of Aerial Photos in Android Systems for UAV
刊物
- 2014航太學會學術研討會
2015李建緯
地面供電之長滯空多旋翼機設計與研製
Long endurance multi-rotor UAV design and development with ground power supply
刊物
- 2015全國飛行機器人飛行競賽-創意設計組第三名
- 「中區技專校院校際聯盟」2014年研發成果網路聯合發表會特優
2017沈揚尉
太陽能長滯空無人飛機電能系統設計和驗證
Solar Power System Design and Verification for Long Endurance UAV
刊物
- 2017光電,信號,與通訊創新科技研討會
2018陳宣霈
農用噴灑多旋翼載具
Multi-rotor For Agriculture
刊物
- 2015全國飛行機器人飛行競賽-自主飛行組佳作
大學部專題生
96年
陳政旗
李憲祺
黃俊騰
邵柏智
農用噴灑多旋翼載具
Multi-rotor For Agriculture
刊物
- 2015全國飛行機器人飛行競賽-自主飛行組佳作
96年
陳韋憲
李冠儀
許晉維
陳柏翰
林佩蓉
無人載具自動飛行系統設計
UAV autopilot design and implementation
刊物
- 2007 Microchip 16-bit微控制器校園專案研發成果賽第一名
- 2007年校慶學生專題製作成果展第一名
- 2007全國無人飛行載具設計競視距外飛行組第三名
- 常陽獎學金
96年
沈孟軒
林自強
張銘宏
陳育儒
黃健涵
微型飛行器之即時監控與實現
MAV real-time monitoring system
97年
廖千純
周加琳
蔡泓璟
吳健瑀
微衛星系統設計
Micro satellite system design
刊物
- 2007 Microchip 16-bit微控制器校園專案研發成果競賽優勝
97年
吳駿廷
林進和
黃俊仁
楊翰昇
載具無線影像追蹤辨識系統製作
UAV image tracking identification system
98年
徐千岳
李維彬
周修賢
許沈融
陳偉瀚
飛行腳踏車
Flying bicycle
98年
簡瀚偉
陳啟倫
陳威崧
鄭鴻新
林谷融
航空載具-翼地效應船
Wing effect boat and UAV
100年
郭昌儒
林宗翰
劉昌瑋
陳嘉業
陳凱佑
張雨柔
陸空兩用飛行載具
Air and land vehicle
100年
廖嘉綸
葉東陽
黃子晏
郭冠志
陳永寬
第一人稱飛行之無線通訊系統
FPV wireless communication system
101年
吳昌韋
紀榕宏
林家弘
林連紹楷
漂浮玩具
Adrift toys
101年
游祐嘉
黃得綸
鍾明倫
蔡宗霖
尤楚璂
飛行車之導控系統研製
Flight control system of flying car
101年
沈雨萱
林彥希
胡晉豪
溫志揚
謝欣凱
大氣探測之無人飛行載具設計與應用
Design and application of UAV for atmospheric exploration
刊物
- 2012台灣無人飛機創意設計競賽-初階引擎之載重提升第四名
- 2. 2013台灣無人飛機創意設計競賽-初階引擎之載重提升第一名
102年
游景航
王又嶒
李和展
黃大洲
智慧手機之心跳量測系統
Smartphone’s heartbeat measurement system
102年
高銓尉
詹翔任
蔡允中
陳運祥
iOS-Phone Jack供電與資料傳輸技術
Power supply & Data transmission of iOS-Phone Jack
103年
李恩賢
黃景正
蕭翔文
羅際林
無人航空載具系統之應用與研製
Application and development of UAV system
103年
王振宇
吳泓億
胡允誠
蔡嘉珉
32位元之單晶片電腦GPS介面控制與GPS靜態定位的性能分析
Performance analysis of 32bit SOC for GPS interface control and positioning
104年
許理翔
吳晨煜
黃冠騏
農用多旋翼噴灑直升機
Agricultural Sprinkling Multi-rotors Helicopter
104年
吳皇穎
邵建豪
李 鴻
簡乙慶
無人飛機創意應用
UAV creative applications
105年
高啟軒
游哲瑋
詹立宇
劉昱廷
王韋鈞
燃料電池供電之無人飛機 性能測試與應用
Performance testing and applications of UAV powered by fuel cell
刊物
- 2016校慶全國學生專題製作競賽第三名
- 2017「全國儲能應用專題創意競賽」第三名
105年
何宗昱
吳薾亦
沈克學
卓志儒
長滯空太陽能飛機電力系統設計
Design of long–endurance solar UAV power system
刊物
- 2017「全國太陽光電創意應用競賽」第一名
105年
丁郁庭
林成軒
張逸
陳俊彥
地面供電之長滯空多旋翼機設計與研製
Long Endurance Multi-rotor UAV Design and Development with Ground Power Supply
106年
林仕翔
林修宇
趙政隆
林靖皓
徐品醫
32位元 Autopilot航空感測系統
32-bit Autopilot Aviation Sensing System
刊物
- 2017全國能源科技創意實作競賽最佳模型製作
- 106年度名揚虎科卓越(常陽)獎學金
106年
許尚謀
高正桓
倉浩軒
許凱翔
地面供電之長滯空多旋翼機捲線機構設計與研製
Design and Development of Wire reel for Multi-rotor unmanned aerial vehicle with power supply on Ground
106年
許明信
張晏娸
陳穎萱
ADS-B 資料接收與回放研究
ADS-B data reception and playback research
107年
林建中
徐亞駿
劉易鑫
楊怡鋒
32位元UAV 飛控系統
32-bit UAV flight control system
107年
吳東霖
莊竣名
廖千翔
尚衍容
太陽能無人機電能系統
Solar Drone Power System
107年
廖秉豪
黃紹凱
賴宸宇
何維承
星基ADSB大數據系統
Satellite-based ADSB big data system
無人飛機導控技術
(1) 自主飛行電腦:已經過100km跨海飛行和4000m大氣溫濕度任務執行成功,2012年已商品化技轉雷隼科技(股)公司。
(2) 地面導控站系統:配合自主飛行電腦發展,本(技術)產品亦同時設計和經過三版本的改善,在2012年商品化技轉給雷隼科技和經緯衛星資訊。


圖1.1地面導控站系統
(3) 天線自動追蹤系統:為了提高無人飛機的導航控制距離,使用高增益的指向形天線,搭配天線旋轉台與地面導航控制站軟體所建構的系統。從接收回傳的飛行資料與遙測資料,來推估地面站與UAV的相對的位置,計算天線旋轉台所需指向的方位角(Azimuth angle)與仰角(Elevation angle),藉此提高導控距離。本(技術)產品配合自主飛行電腦發展,也於2012年商品化技轉給雷隼科技(股)公司和經緯衛星資訊(股)公司。


圖1.2天線自動追蹤系統
(4) 多機導控系統:此為執行中科院計畫的成果,相當具有戰術價值,尤其對電動飛機的軍事運用。


圖1.3多機導控系統
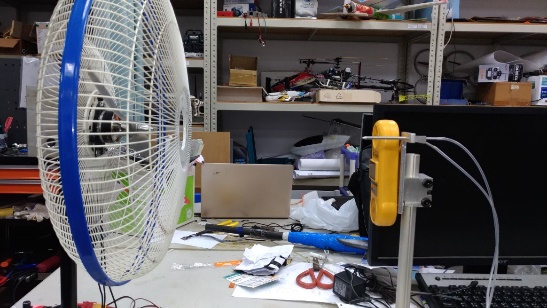
(5) 車載供電之電動飛機系統:著眼於電動飛機的續航力不足,而且民航局對於無人飛機的管制趨嚴,尤其在重要交通建設附近,根本不允許無人飛機的飛行。因此本實驗室開始研發車載供電電動飛機系統的動力,飛機由地面電纜線傳輸電力滯空保持在25~50m高,有別於目前國內除固定翼和旋翼無人飛機外,任務執行時可以多一種選擇。此系統的構想由以色列Skysapience公司所提出的HoverMast多旋翼系統。
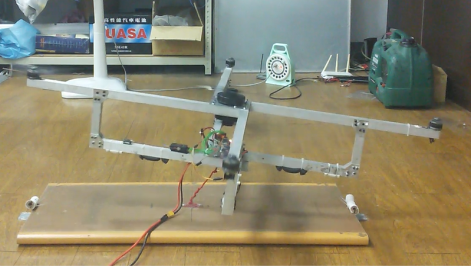

圖1.4 HoverMast實驗機
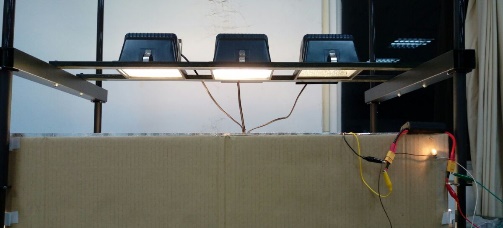
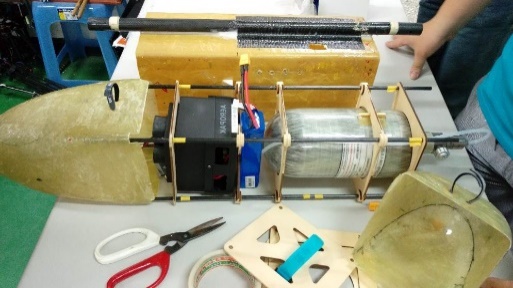
(6) 太陽能無人飛機:載具動力的電動化是一個趨勢,從2016年本實驗室除完成100W的燃料電池(Fuel cell)無人飛機的試飛評估外,以發展長滯空(Long endurance)太陽能無人飛機為主要研究方向。在2016年完成翼展3公尺重4.5公斤106W太陽能發電與147Wh鋰電池儲能連續飛行6小時紀錄後,2017年與本系師生團隊設計製造一架翼展10m重約25kg的中型太陽能無人飛機,在屏東6月和11月的試飛,完成自主飛行調校和爬升至1300m的紀錄。


圖1.5 3m燃料電池混電能無人機、3m太陽能無人機


圖1.6 10m翼展太陽能無人機1A, 1B和2A機型







頻譜分析儀






姿態控制系統教具






研究領域:無人飛機、衛星和系統整合等
| 作品名稱 | 競賽名稱 | 得獎名次/將金 | 性質 |
| 2017全國能源科技創意實作競賽 | 2017年名揚虎科卓越(長陽)獎學金 | 五萬元 | 全校 |
| 太陽能長滯空無人飛機 | 2017全國能源科技創意實作競賽 | 最佳模型製作二萬元 | 全國 |
| 太陽能長滯空無人飛機 | 2017「全國太陽光電創意應用競賽」 | 第一名六萬元 | 全國 |
| 混電能無人飛機系統 | 2017「全國儲能應用專題創意競賽」 | 第三名五千元 | 全國 |
| 空氣 | 2016台灣無人飛機創意設計競賽-飛行性能組 | 佳作 | 全國 |
| 燃料電池供電之無人飛機性能測試與應用 | 2016校慶全國學生專題製作競賽 | 第三名五千元 | 全國 |
| 地面供電旋翼無人機 | 2015全國飛行機器人飛行競賽-創意設計組 | 第三名五千元 | 全國 |
| 虎尾農噴 | 2015全國飛行機器人飛行競賽-自主飛行組 | 佳作三千元 | 全國 |
| 地面供電之長滯空多旋翼機設計與研製 | 「中區技專校院校際聯盟」2014年研發成果網路聯合發表會: | 特優一 | |
| 鯊魚遙控飛機 | 2013台灣無人飛機創意設計競賽-初階引擎之載重提升 | 第一名 | 全國 |
| 多旋翼手自動飛行系統之研製 | 2013 Microchip微控制器校園專案研發成果競賽 | 佳作 | 全國 |
| 可攜式多功能顯示系統 | 2012日內瓦發明展發明競賽 | 金牌獎 | 世界 |
| 無人飛機系統 | 2012台北國際發明暨技術交易展發明競賽 | 銀牌獎 | 世界 |
| 鴟鴞遙控飛機 | 2012台灣無人飛機創意設計競賽-初階引擎之載重提升 | 第四名 | 全國 |
| 地球守護者人類好幫手(無人飛機系統) | 2011年教育部全國技專校院研發成果記者發表會 | 發表作品 | 全國 |
| 旋翼機自主飛行系統 | 2011 Microchip微控器校園專案研發成果競賽 | 第四名 | 全國 |
| 整合GPS/INS應用於UAV姿態與位置估算 | 2010 Microchip16/32 bit MCU校園專案設計競賽 | 第二名技術挑戰獎 | 全國 |
| 雷隼科技股份有限公司 | 2009 年u-star教育部大專畢業生創業競賽 | 製造業前五名 | 全國 |
| 伊梅爾曼 Immelman無人飛機系統 | 2009全國無人飛行載具設計競賽視距外飛行組 | 第一名最佳報告獎 | 全國 |
| 遙控直昇機輔助駕駛系統 | 2009 Microchip全國大專微處理機設計競賽 | 第三名 | 全國 |
| 可攜式無人飛機地面站 | 2009年校慶學生專題製作成果展示與競賽 | 第一名 | 全校 |
| 即時多工嵌入式無人飛機自主飛行系統 | 2009年Microsoft嵌入式系統設計競賽 | 第二名 | 全國 |
| 無人飛機自主飛行系統 | 2009年全國大專校院嵌入式系統(ES)設計競賽創意應用組 | 佳作 | 全國 |
| 2008全國無人飛行載具設計競賽視距外飛行組第一名 | 常陽獎學金 | 三萬元 | 全校 |
| Immelman無人飛機系統 | 2008全國無人飛行載具設計競賽視距外飛行組 | 第一名 | 全國 |
| 遙控直昇機輔助駕駛系統 | 2008教育部全國微電腦應用設計製作競賽研究所控制組 | 第二名 | 全國 |
| 先進無人飛行載具 | 2008教育部全國微電腦應用設計製作競賽研究所組 | 第三名 | 全國 |
| 影像偵蒐式無人飛行載具 | 2008 Microchip 16-bit微控制器校園專案研發成果競賽 | 第二名 | 全國 |
| 伊梅爾曼無人飛機 | 2007全國大專無人遙控飛行載具設計競賽視距外飛行組 | 第三名 | 全國 |
| 最佳化自主飛行控制器 | 2007 Microchip 16-bit微控制器校園專案研發成果競賽 | 第一名 | 全國 |
| 遙測系統穩定性的確保方法 | 2007 Microchip 16-bit微控制器校園專案研發成果競賽 | 優勝 | 全國 |
| 無人飛行載具自主飛行系統 | 2007年校慶學生專題製作成果展 | 第一名 | 全校 |
專利:
[1] ”無人飛行載具自主飛行電腦系統及控制方法”中華民國專利第I558617號,43卷33期, 2016/11/21
[2] ”長滯空飛機結構改良”中華民國新型專利第M523495號 ,2016/06/11
[3] ”耳機孔傳輸裝置之改良”中華民國新型專利第M478191號 ,2014/05/11
[4] ”無人飛機航管回報系統”中華民國新型專利第M492875號,2015/01/01
[5] “可攜式模組化小型無人載具之多機導控系統及其操控方法”中華民國發明專利第I443549號,41卷19期,2014/07/01
[6] “偵測遙控器之運動以控制遙控直昇機飛行的系統及方法”華民國發明專利第I379702號,39卷36期,2012/12/21
[7] ”具左右輪差速感測駛向之車輛定位及輪胎狀況監控系統”中華民國發明專利第I306060號,37卷02期,2010/1/11
[8] ”感測器參數調校方法“中華民國發明專利第I308767號,36卷11期,2009/04/11
[9] ”指節紋身份辨識方法及裝置”中華民國發明專利第I308300 號,36卷10期,2009/04/01
[10] ”整合型液晶顯示儀表板”中華民國發明專利第I306063號,36卷05期,2009/02/11
[11] ”電腦網路定位追蹤方法及系統”中華民國發明專利第I304936號,36卷01期,2009/01/01
[12] ”輕航機資訊傳輸與儀表顯示方法及其系統”中華民國發明專利第I301111號,35卷27期,2008/09/21
[13] ”一種遙控與自動重置以確保穩定的嵌入式作業系統與方法”中華民國發明專利第I295009 號,35卷09期,2008/03/21
[14] ”加速度計感測車輛轉向角度之方法與裝置”中華民國發明專利第I287620號,34卷28期,2007/10/01
[15] ”載具之整合定位系統與方法”中華民國發明專利第I250303號,2006/03/01
[16] ”攜帶型航行資訊顯示方法”中華民國發明專利第I235969號,2005/07/11
[17] ”載具之GPS /INS定位系統的訊號感測及輸出控制方法與系統”中華民國發明專利第583411號,2004/04/11
[18] ”Apparatus and method for detection for use in a touch-sensitive pad”中華民國發明專利第166450號、美國發明專利第6954868號,29卷30期,2005/10
[19] ”俱電源控制功能攜帶式電子裝置之週邊裝置”中華民國發明專利第548541號,美國發明專利第6778006號,2003/08/21
[20] ”適用於手持型資訊處理裝置之輸入裝置”中華民國發明專利第535095 號、美國發明專利第6801812號,2003/06/01
論文:
Journal
[1] ”微衛星電腦系統與電源子系統之整合研究”, Journal of Aeronautics, Astronautics and Aviation, Series B (EI), Vol.44, No.1, pp.001 – 008, 2012
[2] ”Structure Design for TUUSAT-1A Microsatellite”, WSEAS TRANSACTIONS on APPLIED and THEORETICAL MECHANICS, Volume 5, Issue 1, pp45-58, ISSN: 1991-8747, January 2010.
[3] ”The optimal performance estimation for an unknown PEMFC based on the Taguchi method and a generic numerical PEMFC model”, International Journal of Hydrogen Energy(SCI), pp.1990~1998, Vol.34, 2009
[4] ”Analysis of Radiation Effect on an Onboard Computer of Microsatellite”, Journal of Aeronautics Astronautics and Aviation, Series B (EI), Vo.41, No.1, pp35-42, April, 2009.
[5] “Sliding Mode Controller Design with H∞ Norm and Variance Constraints for Bilinear Stochastic Systems”,IEICE,Transactions on Fundamentals of Electronics,Communications and Computer Sciences(SCI),vol. E91-A,no. 2,pp. 686-691,February,2008。
[6] ”Real-time Function of On-Board Computer and Flight Software Design for Microsatellite”, Journal of Aeronautics, Astronautics and Aviation, Series B (EI), Vol.40, No.2, pp.093 ~102, 2008.
[7] ”The Strategy for GPS Lost Positioning”, Journal of Aeronautics, Astronautics and Aviation (EI), Series A, Vol.38, No.4, pp. 225~232, March, 2006
[8] “The Imagery Payload Design for Passive Magnetically Stabilized Micro-satellite”, AIAA Journal Spacecraft and Rocket (SCI, EI), Vol.40, NO.3, P396~404, May, 2003
Conference
[1] ”高長滯空太陽能無人飛機國內外之發展情形”, 2017航太學術研討會,台中, Dec. 9th, 2017
[2] ”翼展3m太陽能無人飛機電能系統飛行測試”, 2017光電,信號,與通訊創新科技研討會,高雄, May 26th, 2017
[3] ”Design of Airfoils for a Solar-Powered Unmanned Aircraft” 2015 AASRC Conference, 2015/12/05
[4] “OpenCV於Android系統下實現及實UAV地面影像辨識與目標追蹤之可行性研究”, 2014 中華民國航太學會學術研討會,台南,2014/12
[5] “地磁量測與無人飛機地磁量測酬載之研究”2013 中華民國航太學會學術研討會,台北,2013/12
[6] ”電動無人飛機應用在都會區空氣品質監測之研究” 102年陸軍官校研討會,鳳山,2013/05
[7] ”無人飛機大氣與地球暖化酬載發展和載具調校之研究”,2012 中華民國航太學會學術研討會,新竹,2012/12
[8] “技專校院技術研發與產學合作之推動策略探討”,技術及職業教育季刊第一卷第二期(ISBN13:9530570100028),2011/04/01
[9] ”導控Mini-UAV之地面控制箱設計及製作”, 第20屆國防科技學術研討會,桃園,2011/11
[10] ”可攜式模組化小型無人機(Mini-UAV)設計開發”, 國防科技學術合作計畫成果發表會論文集,2009/11
[11] ”小型無人飛行載具之多機導控系統開發與飛試驗證”,2009航太學會/民航學會聯合學術研討會,台北,2009/12
[12] ”遙控直昇機輔助駕駛系統之實現”,2009航太學會/民航學會聯合學術研討會,台北,2009/12
[13] ”無人飛行載具自主飛行與地面站系統實現之飛行驗證”,2009航太學會/民航學會聯合學術研討會,台北,2009/12
[14] ”多變量灰色GM(1,n)模型應用於機器人電力管理系統”,中國機械工程學會第二十四屆全國學術研討會論文集,桃園中壢,2007/11
[15] ”微衛星電腦系統之輻射效應分析與測試”, 2006 中國航太學會/中華民航學會聯合學術研討會,中壢,2006/12
[16] “TUUSAT-1A: The First Academic Microsatellite Developed by Universities in Taiwan”, 21st Annual AIAA/USU Conference on Small Satellite, Logan Utah USA, August, 2007
[17] “TUUSAT-1A: A student microsatellite developed by Universities in Taiwan”, UniverSat 2007, Jong-Li, Taiwan, May, 2007
“A TUUSAT-1A Micro-satellite”,Proceeding of The Fourth Asian Space Conference, Taiwan, 2008/11.
完成技術:
嵌入式系統與自主飛行實驗室成立以來,從系上特色發展的需求與航空技術應用到消費性電子產品的創新價值,在每年有限人力與經費支持下,累積的四大核心技術所發展的產品如下表所示:
表1.四大核心技術及相關產品
| 核心技術 | A. 無人飛機導控 | B. 慣性感測器之運動感測 | C. 嵌入式系統 | D. 智慧手機平台應用 |
| 衍生產品 | (1) 自主飛行電腦(2) 地面導控站系統(3) 天線自動追蹤系統(4) 多機導控系統(5) 車載供電之電動飛機系統(6) 太陽能無人飛機 | (1) 姿態與航向參考系統(AHRS)(2) 遙控直昇機手勢遙控器(3) 陀螺儀空中滑鼠 | (1) 數位航海儀表(2) 汽車液晶整合顯示儀表 | (1) iOS耳機孔供電與資料傳輸裝置(2) Android平板電腦之旋翼機手自動飛行系統(3) Android智慧手機任務酬載系統 |
上表除A項無人飛機導控核心技術在前面專業無人機技術服務已說明,其他核心技術和產品進一步說明如下:
A. 慣性感測器之運動感測核心技術
(1) 姿態與航向參考系統(AHRS):微處理器取樣三軸陀螺儀、三軸加速度計與三軸磁力計組成,使用四元素和Extended Kalman filter演算當前載具的滾轉角、俯仰角和偏航角估計值。本技術在100年9月經由一個產學合作計畫商品化技轉給雷隼科技,其精確度與國際大廠Xsens相當。



圖1.7 AHRS產品與展示軟體
(2) 遙控直昇機手勢遙控器:本技術使用三軸加速度計量測手勢遙控裝置的姿態角,然後轉換此姿態角的大小與方向,成為受控直升機座標系運動量與方向的命令。本技術在99年和101年經由產學合作計畫商品化。


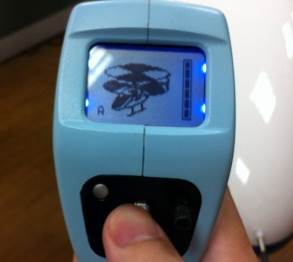
圖1.8 飛行測試與手勢遙控器產品
(3) 陀螺儀空中滑鼠:本技術利用一雙軸陀螺儀量測手握空中滑鼠的上下和左右旋轉運動角度變化,轉換和對應為控制螢幕滑鼠指標位移的距離及方向,稱為Air Mouse,因為MEMS感測器的普及和智慧電視時代的來臨,每個家庭的電視就像一部多媒體電腦,Air Mouse讓我們坐在客廳沙發上操作智慧電視可以像操作電腦一樣方便的產品。本技術在101年11月經由一個產學合作計畫商品化生產。
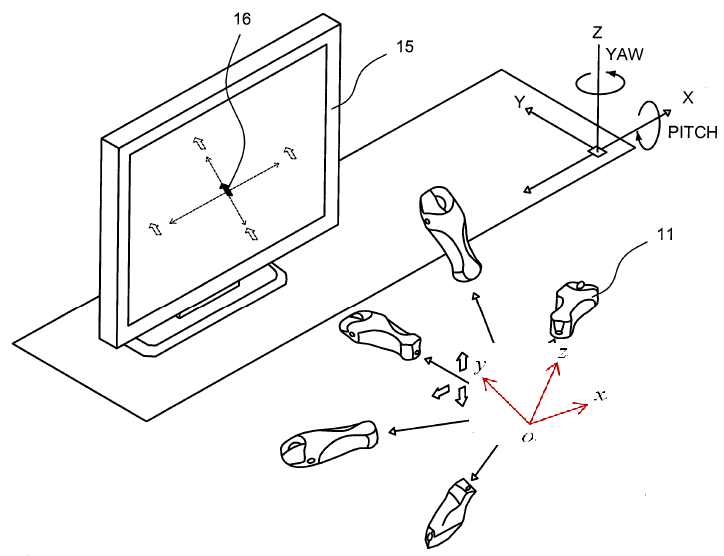



圖1.9 操作概念、陀螺儀的測試、手勢操作照片流覽和滑鼠遙控器產品
B. 嵌入式系統技術
(1) 數位航海儀表:本技術是執行94年翰霖電子委託參與日本Vertex與IESCO公司,費時四年設計一船行數位整合儀表。數位航海儀表必須讀取感測器和顯示風向、風速、船速、水溫與超音波水深,其中風向感測器的參數調校延伸出感測器參數調校的發明專利。本產品由一Converter Box收集和計算所有感測器的資料,然後將航行資料透過RS422界面傳給Multi-meter顯示。產品已經量產五年,並以日本Vertex品牌銷售中。



圖1.10 數位航海儀表的Multi meter和Converter box
C. 智慧手機平台應用技術
(1) iOS耳機孔供電與資料傳輸裝置:消費性電子產品對價格很敏感,耳機孔是智慧手機的標準介面裝置,這類產品不用電池和無線元件,上市時不用昂貴的無線檢測費用,大大降低產品單價和上市的門檻。申請人目前已經建立耳機孔聲道抽取微小電源的技術,完成iOS耳機孔介面紫外線(UV)強度量測模組,相關技術正準備提出專利申請,然後推廣此技術應用,尋求廠商合作設計具價格優勢的智慧手機相關週邊產品。


圖1.11 耳機孔供電和UV模組讀取與顯示測試
(2) Android智慧手機任務酬載系統:實驗室已完成一平板電腦的地磁量測酬載和飛試驗證其可行性。下圖所示,本酬載系統包括一Android 4.04作業系統平板電腦,經由USB界面連接三軸霍爾元件磁力感測器(VMG),量測精度為0.01高斯,裝載於定翼型UAV上進行地球磁場量測。所完成平板電腦APP除能記錄三軸地磁強度外,並將每次量測時讀取平板電腦上的GPS定位資料和平板電腦上慣性感測器所演算出的姿態角一併寫在平板電腦的SD卡裡,降落後再回放於電腦裡分析地球磁場。



圖1.12 Nexus 7與VGM磁力儀、固定在艙內和VGM探棒固定於機身